How High to Fly? Mapping Evapotranspiration from Remotely Piloted Aircrafts at Different Elevations
Abstract
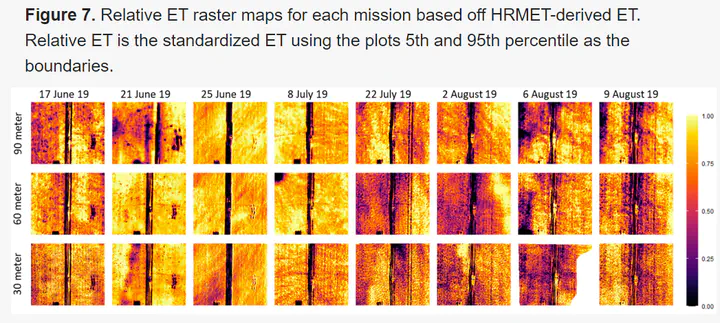
Recent advancements in remotely piloted aircrafts (RPAs) have made frequent, low-flying imagery collection more economical and feasible than ever before. The goal of this work was to create, compare, and quantify uncertainty associated with evapotranspiration (ET) maps generated from different conditions and image capture elevations. We collected optical and thermal data from a commercially irrigated potato (Solanum tuberosum) field in the Wisconsin Central Sands using a quadcopter RPA system and combined multispectral/thermal camera. We conducted eight mission sets (24 total missions) during the 2019 growing season. Each mission set included flights at 90, 60, and 30 m above ground level. Ground reference measurements of surface temperature and soil moisture were collected throughout the domain within 15 min of each RPA mission set. Evapotranspiration values were modeled from the flight data using the High-Resolution Mapping of Evapotranspiration (HRMET) model. We compared HRMET-derived ET estimates to an Eddy Covariance system within the flight domain. Additionally, we assessed uncertainty for each flight using a Monte Carlo approach. Results indicate that the primary source of uncertainty in ET estimates was the optical and thermal data. Despite some additional detectable features at low elevation, we conclude that the tradeoff in resources and computation does not currently justify low elevation flights for annual vegetable crop management in the Midwest USA.
Ammara Talib
PhD Candidate, Civil & Environmental Engineering
My research interests include using process based models, machine learning, and statistical modeling to predict and forecast water quality and quantity issues.